New Features
ANYbotics Workforce
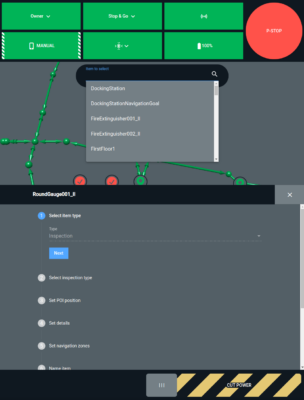
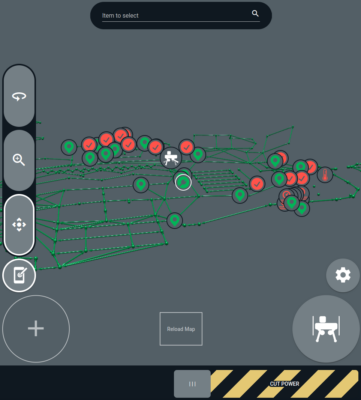
We have introduced new ANYbotics Workforce features to further simplify and accelerate mission setup and deployment of ANYmal. During setup Operators can now select and edit Environment Objects from ANYbotics Workforce, enabling them to make corrections or update pre-populated Environment Objects while in the field. To do so, navigate to the map page and search for an Environment Object in the search bar or simply select an Environment Object from the visualization. After selecting an Environment Object an editor will open, allowing Operators to modify the respective item.
You no longer need to remember and type the exact name of a mission to start it, nor be limited to only starting missions from the beginning. To run Autonomous Missions, the mission page now allows you to select from a list of available missions that are loaded on ANYmal. From the same page, you can now choose to run missions from any task as a starting point to the end.


Docking Station Based SLAM Initialization
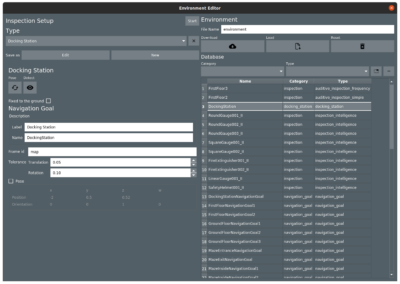
In addition to the current place recognition feature, ANYmal can now use the docking station for localization initialization. This is especially helpful in locations which are challenging for place recognition initialization, e.g., places with uniform or repetitive building features. This feature can be enabled by checking the “Fixed to the ground” box when setting up the docking station. By checking this box, the Operator confirms that the docking station will not move, and therefore, ANYmal can rely on that location to determine its current position. You can configure this in both ANYbotics Workforce and the Operator GUI.

Important Changes
Updating ANYmal Software
To install this software update, we require an additional step on each PC that is to be updated. Note that not following this procedure will result in an inoperational robot until it is run.
After running sudo apt update and sudo apt upgrade, additionally run sudo apt autoremove.
Protective Stop Now Engaged at Boot
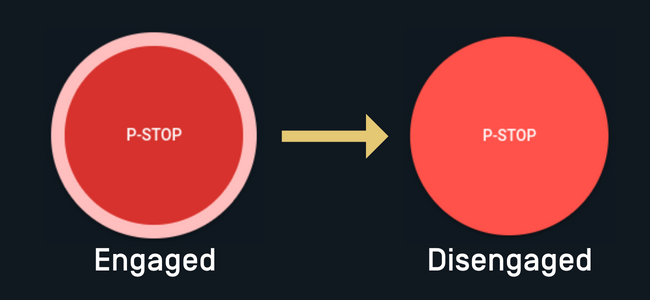
When booting up ANYmal, the protective stop will now be engaged and requires a manual release before the robot can be operated. The protective stop can be released via ANYbotics Workforce or through the Operator GUI. Additionally, the Protective Stop can now also be disengaged through ANYmal API.
Workflow Changes
ANYbotics Workforce
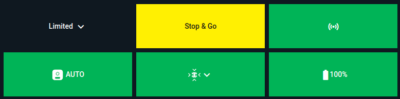
The status bar in ANYbotics Workforce has been updated to now always flash yellow when an obstacle is detected. Previously, this only flashed yellow when the robot was in manual control. Similar behavior in the Operator GUI remains unchanged.
On the mapping page, Operators now have an option for interacting with the map via single-touch interaction, such as when using a pen. On the left hand side of the Workforce interface, select the option to either pan, rotate, or zoom around the map.
Manual Control has been tuned for more intuitive control by Operators. ANYmal will now respond more swiftly to Operator input, as opposed to previously requiring a pronounced acceleration period to get up to speed.
Environment Setup
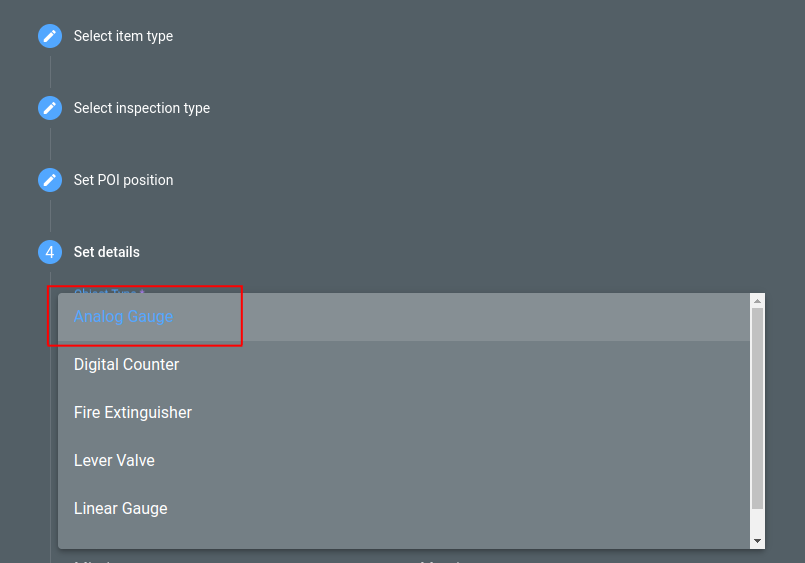
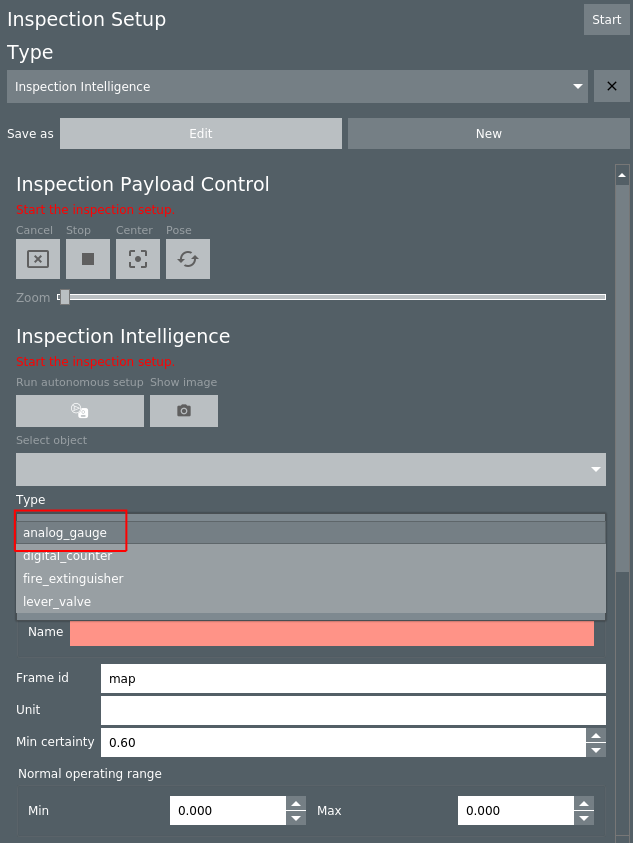
Inspection Intelligence items round_gauge and square_gauge have been rolled into one item, analog_gauge. When setting up a gauge, you no longer have to specify the shape of the gauge. The deprecated types will be converted automatically.
Motion States
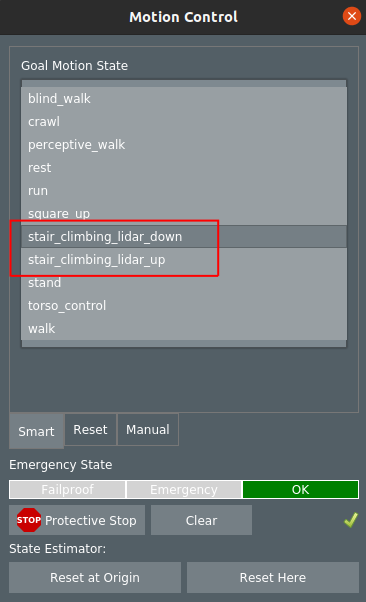
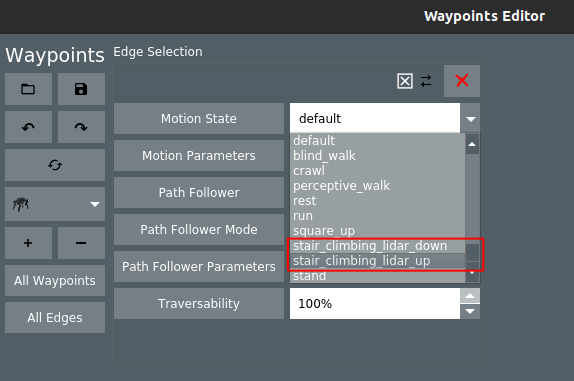
During setup of the waypoint graph, note that the stair_climbing motion state has been split into stair_climbing_lidar_down and stair_climbing_lidar_up, allowing users more flexibility when setting up stair climbing in the waypoints graph. Previously, Operators could only choose ANYmal’s orientation for climbing stairs in manual mode and Autonomous mode required the LiDAR down orientation.
Bug Fixes
Occasionally, ANYmal was not able to save a newly generated map and was unrecoverable. This bug has been identified and patched back to the 22.08 release. Please submit a ticket at support.anybotics.com if you still see this behavior.
In Release 22.12, ANYmal’s Walk mode caused an unusually high load on the CPU. This resulted in potentially slow handoff of control, failure to detect the Inspection Setup Tag, or other minor symptoms. Release 23.02 no longer sees this behavior. If you still have unusual symptoms, please submit a ticket.
Known Issues
When using the Data Sync GUI with ads_local, progress sometimes jumps to 100%, but the folders that were to be synced are not shown. This is caused by long upload times. Simply wait a few more minutes and refresh the list of folders again.